

Static systems are always either statically determined or statically undetermined.
The main difference between static systems is that in statically undeteremined systems, bearing forces and deformations are interdependent, while statically determined systems can also be determined without taking deformation into account.
The calculation results of statically determined systems can therefore be reproduced very precisely. In the case of statically undetermined systems at a large number of suspension points, the reproduction of the calculation results is more difficult, since even small differences in the positioning of the suspension points can cause large differences in the bearing forces.
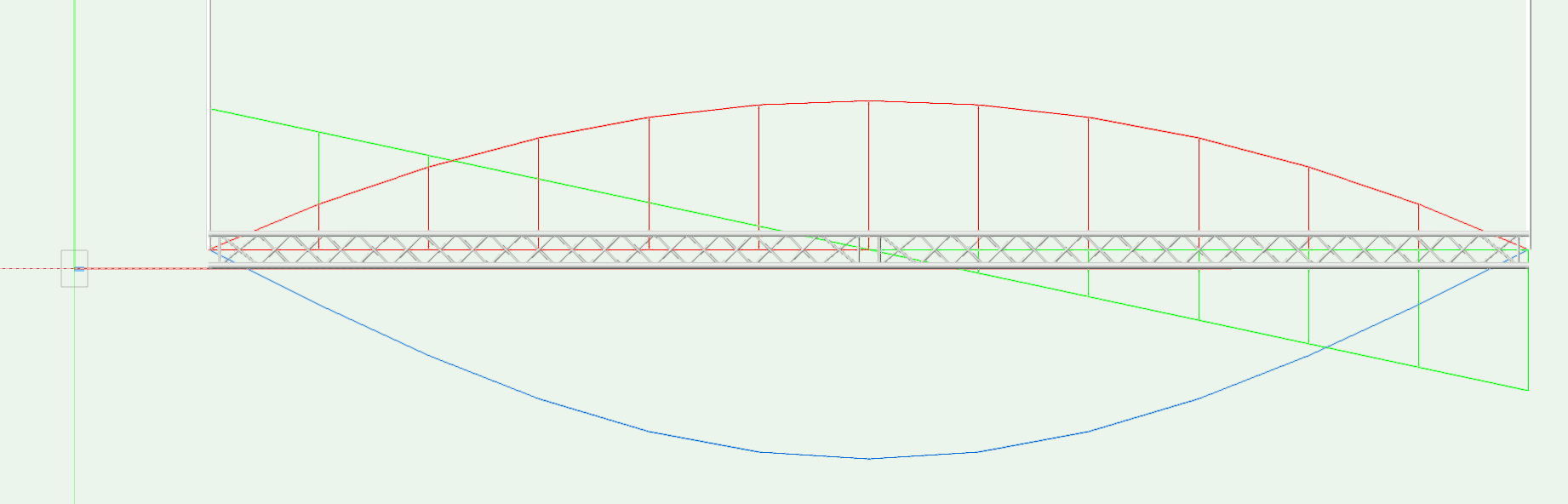
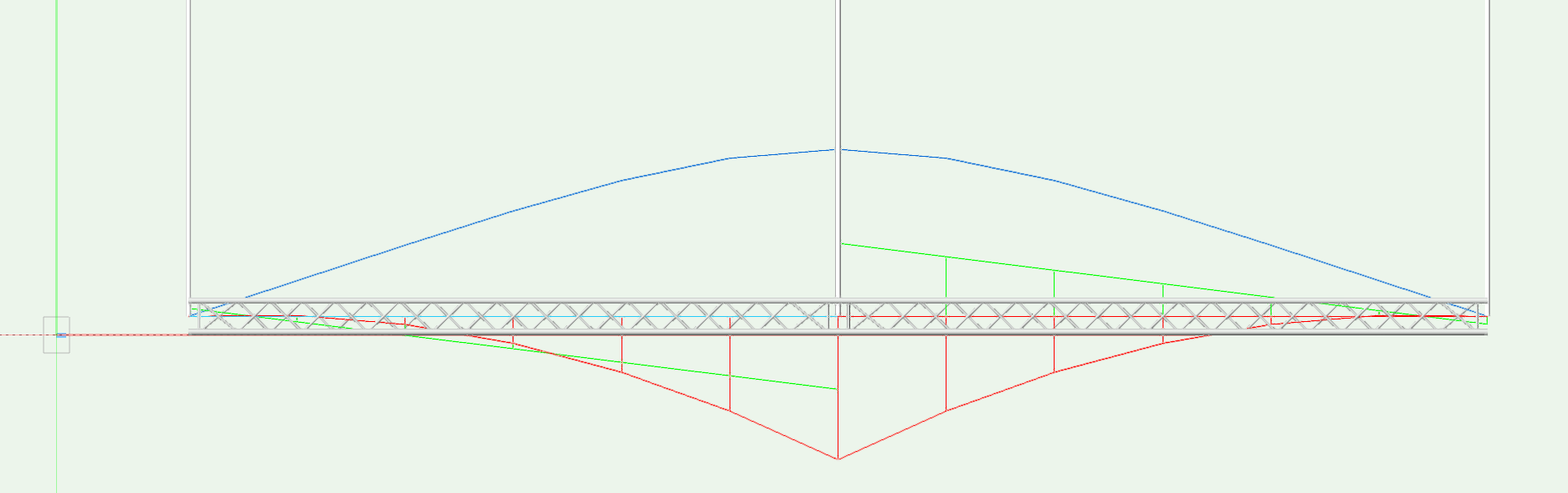
Influence line gradients for a statically determined system (blue: deformation, red: bending moment, green: transverse force)
Model for a statically determined system
The bearing forces in statically determined systems can be calculated without considering the stiffness of the system and the resulting deformation. Small displacements and rotations have no influence on the bearing forces. A statically determined system could be a 2D system with two suspension points or a 3D system with three suspension points.
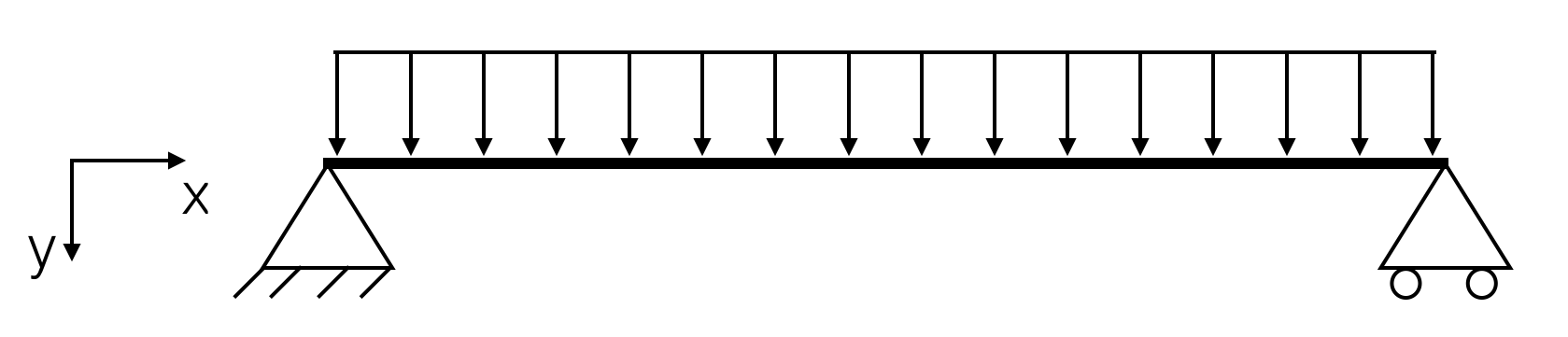
For the above system, the bearing forces can be determined by the equilibrium of forces. By means of two equations with two variables, the solution is unambiguous.
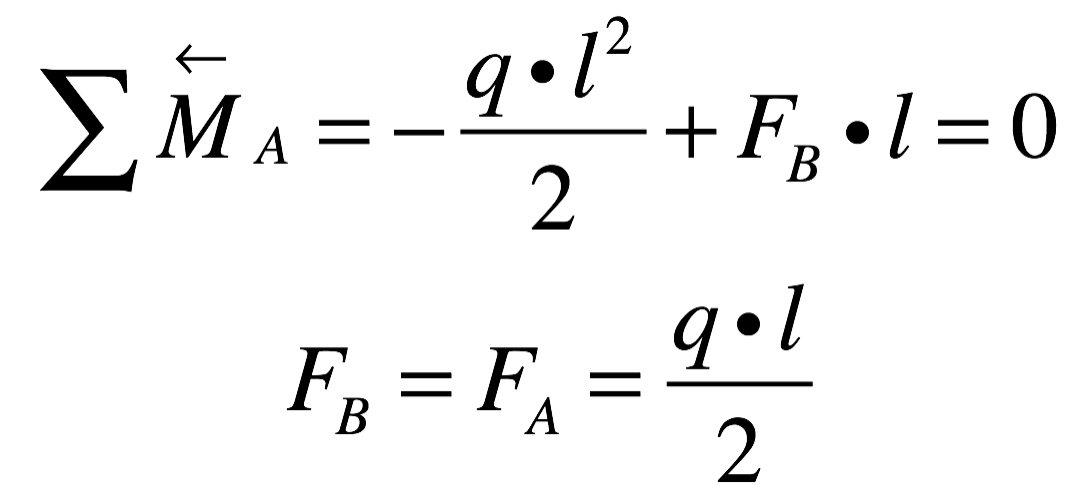
Equilibrium of forces in the statically determined system
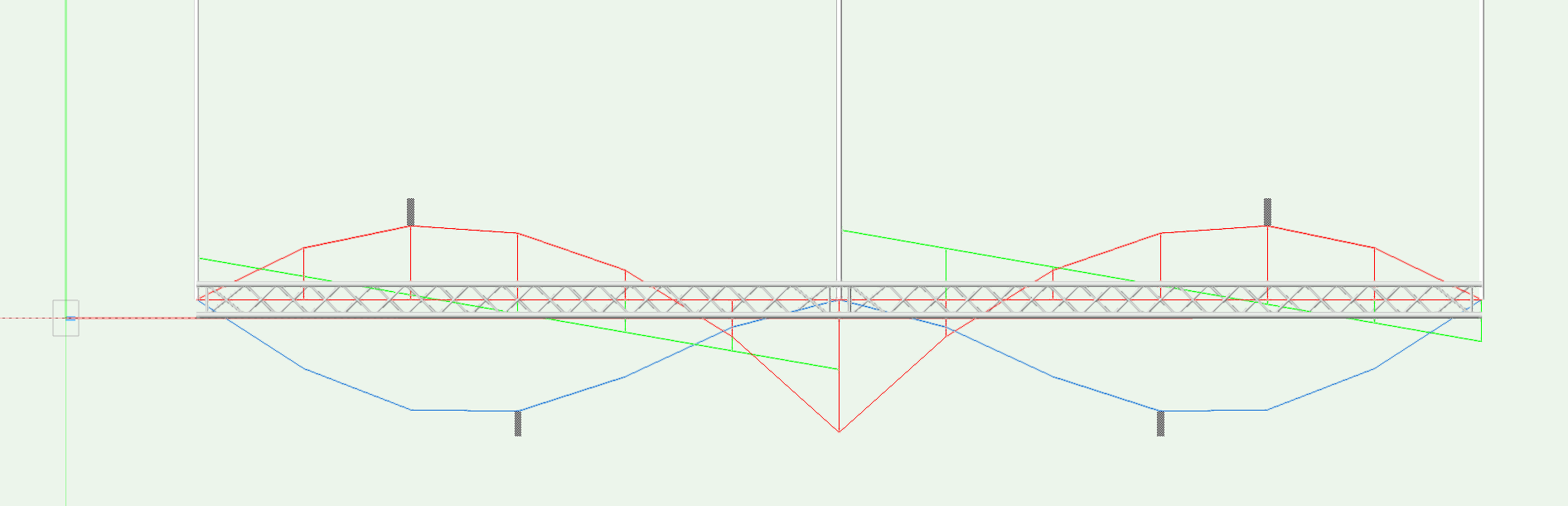
Influence line gradients for a statically undetermined system (blue: deformation, red: bending moment, green: transverse force)
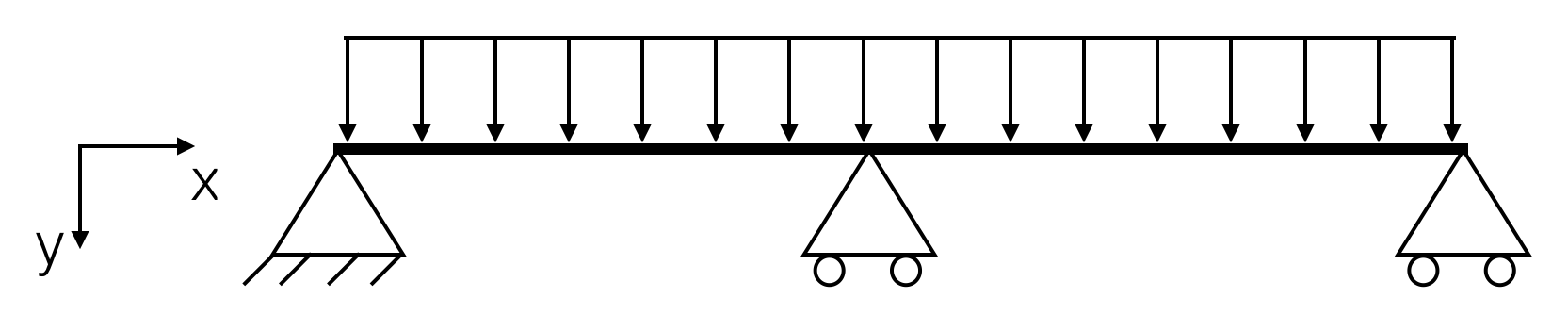
Model for a statically undetermined system
In order to calculate statically undetermined systems, the stiffness of a system must be taken into account because forces and deformations are dependent on each other. This also leads to the fact that even small deformations or imperfections can cause large changes in the bearing forces.
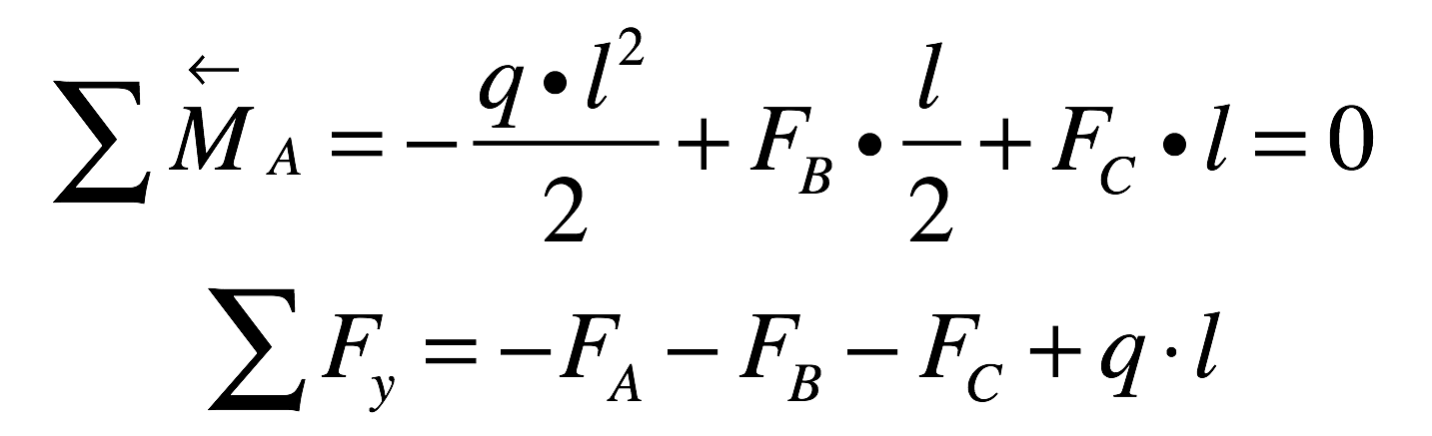
Equilibrium of forces on a statically undetermined system
Static indeterminacy is mathematically depicted in such a way that more unknowns than equations are available in the equilibrium of forces and the solution is therefore no longer unambiguous.
The deformations and bearing forces of statically undetermined systems can be determined with the help of differential equations.
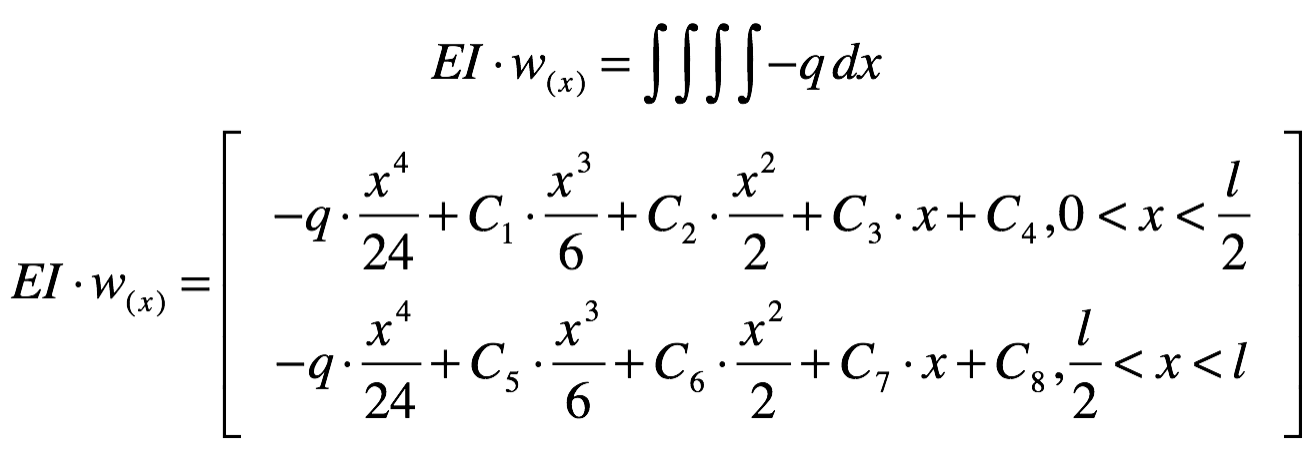
Deflection function as integrated line load function in a statically undetermined system
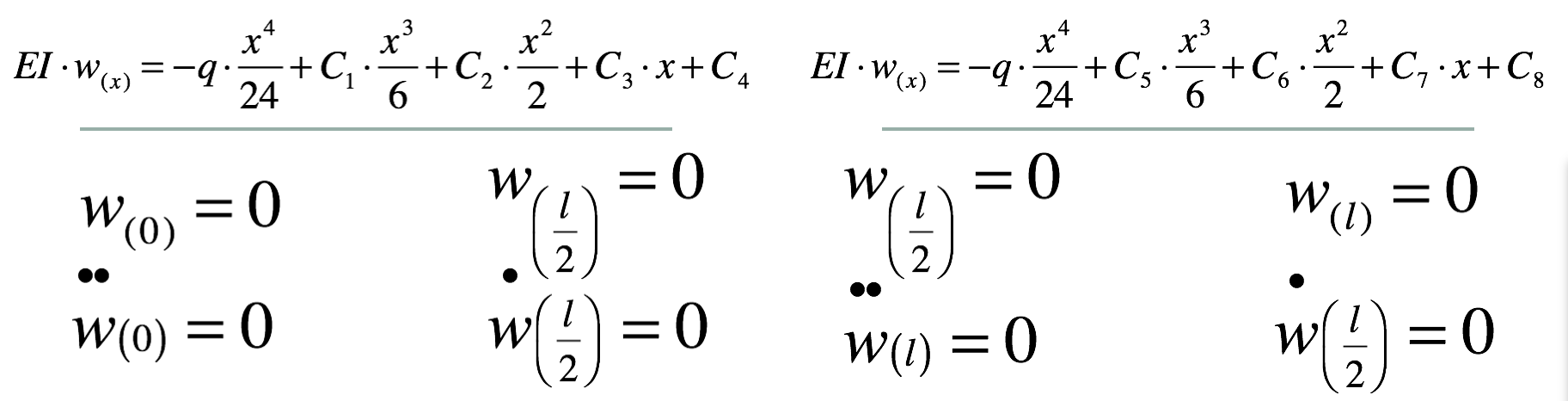
Determination of integration constants via boundary conditions (constraints)
At the boundary conditions, the dependence on the real geometry becomes clear. Since a deflection of "0" is assumed on all bearings in order to achieve results, all calculated forces and deformations apply only to exactly this state. However, if these boundary conditions do not occur in reality, the results do not apply.
The bearing forces of a statically undetermined system are extremely dependent on the boundary conditions. In the event industry, these are essentially the suspension point positions. Each static calculation makes certain assumptions about the exact position of suspension points, and the calculation will only describe exactly this state. If the user cannot reproduce the suspension point positions in the structure exactly, the bearing forces change. Production Assist takes this behavior into account with the functions Rope Shortening and Chain Shortening. This allows considering the influence of vertical support displacements or chain adjustments on the calculation. There are no "correct" values for this. The values depend on how the system is built.
Influence line gradients for the statically undetermined system from above with 5mm rope shortening in the middle
The consideration of the positions of hoists and suspension points is of great importance in the calculation and operation of structures in event technology.
If the calculation and the actual structure do not match, the real values resulting from load measurement, for example, deviate significantly from the calculation.
A leveling of structures is mandatory.
When setting up and dismantling truss systems by means of motors (hoists), not only do dynamic effects often occur, but forces resulting from the asynchronous operation of motors (hoists) as well (in order to take account of dynamics, see =>Eurocode 0/Classification of influences).
In order to get an impression of the forces caused by differences in hoist running times, the rope shortenings described above can be used. The influence of runtime differences is particularly great when hoists close to each other are utilized very differently and thus run at very different speeds.